��g�����A���@�c��A���a���A�[���m��Y�A���c�m��
�@��t��w�H�w���d�q�@�B�H�w��
��������������������������.����.�������������.����.���@�@
�s�d�k7�e�`�w�@043�290�3195
����M�_
�����H�ƍ������w�Z
�@shimoi��tokyo�ct.acjp�@
TEL�@0426�68�5164
Humanitarian mine detection six�1egged walkillg robot and
Hybrid Neuro ]V�yotion Control with Position��Force Contro1
�j�D�m�����������C�p�D�i�D�g���������C�c�D�j���������C�x[�e���������C�g�D�t�����������@�@�@�@�@�@�@�@�@�@
�b�������� �t������������������
�@�@�@�@�@�@�@���������������������������D�����D���������������D���������
�@N.Shimoi
shimoi��tokyo�ct.ac.jp
�m���� ������������ ���� �X�O �����Mion anti-personnelminesareleftburiedandcontlnuetokj�x:1 or injure many people a�U
over the world�DAs one of the world��s top-1evel nations in robotics�C Japan should promote surveys and
research to detect and dispose of these anti��personnel mJnes fi)r the ultimate good or the envlronment by
using its advanced roktics technologles�D�@Our project has developed and studied highinstrumentation
technologles fbrnunedetection�Cthen mine detection and disposd technologies us�Jg measuring equipment
mountedon lvalking robots based on six��legged teleoperated high technology�D In this reseal��h�Ca neuro-based
hybrld positio�Efi)rce motion control fi)rwalking�@on irregular temaln was studied�C Moreover�Cbnsed on thls
hybrid positio�Efi)rce neuro contro1�Cthe m:ine detecting and avoi(hng autonomous walking or six-1egged
wnlking robot was reahzed�D
�@�@�@�@�@�@�@�@�@�k����
�@���݁C��P���߂��̑ΐl�n�������W�r�㍑��
�S�Ƃ��Ė�U�O�J���ɖ��݂��ꂽ�܂܂ɂȂ��Ă���C
�푈���I����������N�ԂŖ�Q���T�`�l�̑����l�X
���]���ƂȂ��Ă���D���̂��߁C�ΐl�n����P����
���Ƃ����͓I�ɍs���Ă��邪�C������������B
�����邽�߂ɐl�͂ɂ��T�m�E�����Ɉˑ��������
���Ȃ��̂�����ł���C���̂悤�ȕ��@�ł͒n���P
���ɐ��S�N��v����Ƃ������Ă���D�܂��C����
�ΐl���ݒn�����o�ϕ����̏�Q�ƂȂ��Ă���C�n��
�Љ�ɐ[���ȉe����^���Ă���D
�@���̐l����ً}�Ȗ��ɑ��āC�䂪���̓I�^��
���ɂ����đΐl�n���̑S�p�Ɍ����čv�����邱��
��錾���C�햄�ݍ��̐��{�����s���ΐl�n��������
���ɑ��ĐϋɓI�Ɏx�����邱�Ƃ����Ă���D
���̐l���I�ȑΐl�n�����������ɑ���x���́C��
���ݍ��̕����Ɋ�^�����ێЉ�̕��a�ƈ���ɍv��
���邽�߁C�䂪���͍��������ɂƂǂ܂炸�C�Ȋw�Z
�p�̐ϋɓI���͂���ׂ��ł���ƍl����D���ɁC
�䂪���̐�[�Z�p����g�Ƃǂ܂炸�C�Ȋw�Z�p�̐�
�ɓI���͂���ׂ��ł���ƍl����D���ɁC�䂪
�̐�[�Z�p����g���ĒT�m�E�����@�ނ�ϋɓI�ɊJ
�����C�n�c�`�ɂ���ċ��^���邱�Ƃɂ��C�n������
Fig.�P�@Outdoor�@walking�@of�@mine�@det��ction
six�legged robot COMET-l
�����Ɉ�w�v�����ׂ��ł���D���̂��߂ɁC���{�C
�w�E�C���Ԃ����͂��Ċ֘A�Z�p�E���@�ނ̊J����
�i�������K�v������D
�@�{�����͂Ƃ��ɍ�����ɂ߂��댯�����Ȃ݂Ȃ�
�l��ɂ��n���T�m�@�̔���I���P��}��ړI�ŁC
�V�K�ɊJ�����������^�n���T�m�Z���T�𓋍ڂ����U
�����s�^�n���T�m���{�b�g���C���O�Ŏn�߂ĊJ����
���D���̏ڍׂ͌�q���邪�C�J���������{�b�g�Z�p
���v���b�g�t�H�[���ɂ��ėl�X�Ȏ��_����Z�p�I��
�P���s�����Ƃɂ���āC����Z�p�̏��Ȃ��Ƃ����\
�{�̑��x�Ɩ��l���ɂ����S�ł��M���x�̍����n
������̂Ǝv����D
�@�Ƃ���ŁC�������s���{�b�g�̏ꍇ�C�e�r�߂�
����ɋ����I�ɐ��䂷�邱�Ƃ͏d�v�ł���C�e�r��
�߂̋���������K�w�^���䂪�K�v�Ǝv����D
�������Ȃ���C�������s���{�b�g���f���͑�K�̓�
�f���ŋ�������`�V�X�e���ł���̂ŁC���f���Ƃ�
�Ă̐��w���f�����l�����邱�Ƃ�����ł���D����
���߁C���f���x�[�X�̃V�X�e���̐���n��v����
���Ƃ͈�ʂɓ���D����C�����̏ꍇ�͎��s����
�ɂ��w�K�ɂ�菙�X�ɕ����\�͂��l�����C�ŏI�I
�ɕ��s���������Ă���D���̂悤�ɓ����͊w�K�ɂ�
���Č�V�I�ɖړI�Ƃ���s������������@�\���l��
���Ă���D���̂悤�Ȋw�K�����Ă������w���f����
���Đl�Ԃ̔]�����f���������j���[�����l�b�g���[
�N���悭�m���Ă���D�{�����ł͂U�����s���{�b
�g�����Ȋw�K�ɂ�����`����Ƃ��Ẵj���[����
������l������A���S���Y����K�p������D
�B�C�B�C��=�=�
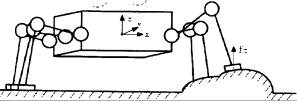
Fig.�Q The image of walking on irregulaJr �Jrrain
with hybrid positio�Efi)rce contro1
�@�Ƃ��ɁC�{�����ł�Fig�D2�Ɏ����悤�ɕ��s���{
�b�g���s���n�ň���ɕ��s�ł���悤�Ɉʒu�����
�݂ł͂Ȃ��C�j���[������Ɋ�Â��n�C�u���c�h�^
�ʒu�Ɨ͂̐�����s�����D����ɁC���̈ʒu�Ɨ͂�
�n�C�u���b�h�^�j���[������Ɋ�Â��āC����ɑ�
�����������T�m�@�ƕ����ɑ��������n�����[�_��p
���āC�s���n�ł̖͋[�n�����Œn����T�m����щ�
�����錤�������݁C���������̂ŕ���D
�@�@�@�@�Q�D�n���T�m���{�c�g�̊T�v
�@�n���T�m���{�b�g�S�̂̊T�ς�Fig�D�R�̂悤�ł�
��D�܂��C�{���{�b�g�̖��̂�COMET-1�i�o::hiba
Universi�u�@��perating�@�@�@Mine�@netection
Electronics Too�gI�j�Ɩ��Â����D
93
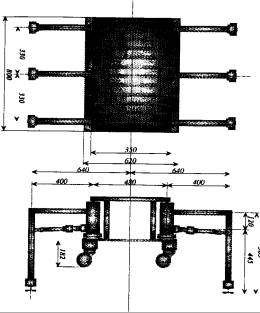
Fig.�R Body size ofCOMET-I
51��s��J�V�@
�F��
7W�Ela�@
�T
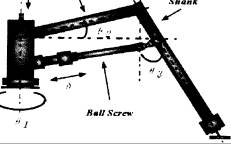
�@�@�@�@�@�@Fig�D4 The structure ofleg
�@�s���n�ł̕��s�̈��S�������m���ɂ��邽�߂�
�U���Ƃ��C�n���̖��݃|�C���g������邽�߂ɑ���
�����Ȏp�������Ă����S��ۂ悤�ɂȂ��Ă���D
Fig�D4�Ɏ����悤�ɂP�r�R���R�x�������C�r�̋@�\��
�͕��s�����N���̗p���Ă���D�܂��CFig�D3�Ɏ�����
���ɂ��̑����ʂ͖�120kg�C����1200�����C���̒���
��800�����C���̍�����1000�����ł���D�������C
�{�f�B�̏�ɓd�q�@�킪���ڂ����D�ύډ\�d��
�͖�20kg�ł���D����ɁC���{�b�g�ɓ��ڂ��Ă���
�@��ނ�Table�D1�Ɏ����D
�@�S�n�����ʃV�X�e��GPS�͒n�����ݒn�_�̊m��
��1cm�̐��x�ōs�����߂ɂ͌������Ȃ��V�X�e����
����D�n�����[�_�͑ΐ�Ԓn���ƕs���e����n���[
�x�����܂ł̍������x�ŒT�m����v�����u�ł���D
�n���T�����[�_�̓��{�b�g�̕����ɑ������āC�n�\
�Ƃ̋��������ɕۂ��ĕ��s���邱�ƂŎ����I�Ƀ�
�{�b�g�̐^���n�����̖��i����T�m�\�ł���D
�r���ȗ�
�ia�jControl sys��m�@�@�@�@�@
M;ddle�iJy��u
�@�@�@�@�@�@�@�@(b)NN Structure
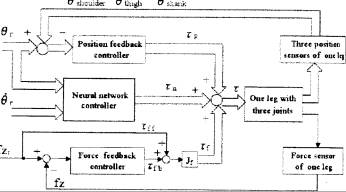
Fig�D2�@Control sys�Jm with positio�E�Jrce hybrid
neuro controller
�@Fig�D6(a)�́C���{�b�g��1�r�R�߂ɑ��āC���
�̏W���^�j���[�����l�b�g���[�N��p�����ʒu�E��
�̃n�C�u���b�h����n�̃u���b�N���}�������Ă���D
���̐���n�́C�܂��e�߂ɑ��āCPD�t�B�[�h�o
�b�N�𗝂����ʒu����ƁC�t�B�[�h�t�I���[�h��PD
�t�B�[�h�o�b�N��p�����͐���̑g�ݍ��킹�ɂ��
�n�C�u���b�h����n����\������Ă���D����ɁC
�j���[�����l�b�g���[�N�w�K�Ɋ�Â��āC���m�ȋr
���f�����Ȃ��Ă���]�̐��䐫�\���������邽�߂ɁC
�P�r�R�߂ɑ���̋t�`�B���^�W���j���[��
�⏞���p�����ʒu�Ɨ͂̃n�C�v���b�h����n���
�v�����B���̋t�`�B���^�W���j���[���⏞��̍\
����Fig�D6(b)�Ɏ����D�����ɂ��C���{�b�g�̂U
�i
�P��
��
�S
�i
�i
�i
�i
��
Table�P�@Equipment�@of�@mine�@detection�@robot
COMET-I
| CPU�{�[�h | 2�� | �n�r�F�q�s-�k�������� |
| �c�`�R���p�[�^ | �R�Q�b�g | 12�r�b�g |
| �`�c�R���o�[�^ | 64�b�g | 12�r�b�g |
| �n�[�h�f�B�X�N | �Q�� | �Q�O�f�a |
| �f�B�X�v���[ | �P�� | �\���E�ً}�� |
| �L�[�{�[�h | �P�� | �\���E�ً}�� |
| �@�@�����h �i�A���e�i�t���j | 2�� | �摜�ƃf�[�^����M |
| �@�b�b�c�J���� �ԊO���J���� | 1�� | �_��T�[�|����t |
| �����g�Z���T | 2�� | ����͈͂U�� |
| �ߐڃZ���T | 6�� | ���w�� |
| �����T�m�� | 6�� | �Q�d���� |
| ���[�^�p�x���o�p�@ �|�e���V�����[�^ | 18�� | �T�[�{����p |

�@�@�i���j�s���� ������ �����Jot with metal sensor, optical
�@�@�@�@�@proximity sensor and �Jrce sensor
Fig.�T�@New�@compact�@metal�@det��ctor,optical
proximity sensor and �Jrce sensor
�@���ɁC���{�b�g�r�敔��Fig�D5(a)(b)�Ɏ����悤��
����V���ɊJ�����������^�����T�m�@�����Ă�
��D���̋����T�m�@�����āC�r���n�ʂɒ��n��
�钼�O�ɋr��n���3cm�̂Ƃ���Ŏ~�߁C���n����
�t�߂ɋ����������Ȃ����ǂ������m�F���āC�����C
a4
��������������ꍇ�͂��̒n�_��������C�����̂�
���Ƃ���ɒ��n����Ƃ������̂ł���D���̓����
���C���{�c�g���n���܂Ȃ��悤�ɂ��邱�Ƃ�
�����ɒn����cm�ɂ���ΐl�n�����T�m���悤�Ƃ�
����̂ł���B
�R�D�ʒu�Ɨ͂̃n�C�v���c�h�^�j���[������@�@�@�@�@�@�@�@
�n�̐v
�@�@�@�@�@�@3�D1�@����n�̐v

�����̖��ݏꏊ�܂Ȃ��悤�ɁC�r���n�ʂɐڐG
����O�ɋ�����T�m����Z���T�ł���D�����ŁC��
���T�m���p�����n���T�m����Ɖ����s���v
���O�����̗����Fig�D14�Ɏ�����āC���������n��
�T�m�Ɖ������O���̗��Fig�D15�Ɏ����D�n�����[
�_�̉�����Fig�D16�Ɏ����DFig�D16����n�\�ɂ���
�̋[�n���̗l�q���N���ɕ���D
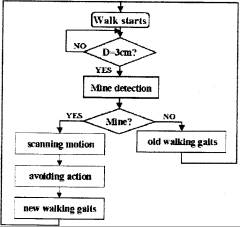
Fig.14�@The control now �Ethe mine scanning 3nd
avoidjllg
0.4�@c,J�@0.6�@0.́@0�e�@0.p�@�@�@
x�Ertlirln[mI
99

�@�@�@�@7�D�͋[�n�����̕s���n���s
�����ł́C�܂��C�����ŁC�ʒu����Ǝp�������
�p�����ʒu�Ɨ͂̃n�C�u���b�h�j���[�������p��
�āC�s���n�ł���̋[�n�����ŁC�n�����[�_�Ƌ���
�T�m�@��p�����n���T�m����Ɖ����s�����D
���̖̋[�n�����̎������e��Fig�D17�Ɏ����D�}�͍�
���x�̒n�����[�_��������T�m���Ă���Ɠ����ɁC
���{�b�g�̂P�̑��̋r���s���n(�i���̍ő卂��
��10cm)�ŕ��s���Ȃ���C���̂P�̑��̋r������
��T�m���ĉ�������Ƃ������̂ł���D
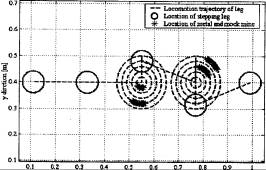
�@���ɁC���O�����̗l�q��Fig�D18�Ɏ����D���̂Ƃ��C
�͋[�n����n���������ɖ��݂��Ēn���T�m�Ɖ����
�����s�����D�͋[�n���͒��a�U�������݂R�����̃v
���X�`�b�N�̒��ɂS�����x�̓S�߂����̂�͋[
�n���Ƃ��Ďg�p�����D�̋[�n��������Ɩ�Q�O
�b�ԁC�r�̓������~���Ă��̊Ԃɓh����n�ʂɐ�
���t����Ɠ����ɁCGPS�ɂ���Έʒu�v���𐳊m
�ɍs���C���ڂ��Ă���R���s���[�^�ƃz�X�g�R���s
���[�^�̗����̒n�}�ɖ��݈ʒu���L�^���Ēn���}�b
�v���쐬���Ă����D
�e����.�P�V �s���� ��(��:�� �������� �����������J��
���������Jg�@on�@irregular�@terrain
position/�Jrce neuro contro1
and�@avoidjllg
with�@hybrid
Fig.18�@The�@mock�@mine�@scanning and�@avoi(hng
walking on field
8�D����
���o
Fig,�P�T�@Autonomous�@created�@tr��ectory�@of mine
scanningandavoidingusingcompactmetaldetector
�P�D�R�i�S�R�f�V�a�o�p�|�o�E�ꁫ�[�R�����ꁒ�V��o�|�m���m
�n�n�p�h�n�p�����p�D�E�E�c�[�d�|�E�|���E���E�t�f�o�E�t���E��
Modnljne
rn11
0.��
��
��15

Fig.16 Responses of sc3nning mock mine using the
radar sensor